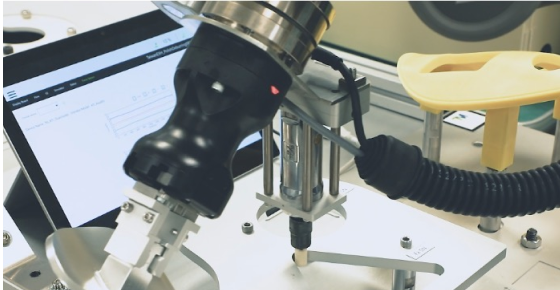
Precisely and consistently controlling the force applied to the surface of the workpiece, combined with corresponding tools, makes the surface of the workpiece shiny or removes excess parts from it. Without force sensing and precise force control, it often requires multiple processing steps and back-and-forth checks, which is very time-consuming.