[mk_page_section bg_image=”https://www.tm-robot.com/wp-content/uploads/2020/07/banner_addon.png” bg_stretch=”true” min_height=”450″ full_width=”true” padding_top=”50″ padding_bottom=”0″ margin_bottom=”20″ sidebar=”sidebar-1″][vc_column][mk_fancy_title color=”#ffffff” size=”40″ force_font_size=”true” size_smallscreen=”40″ size_tablet=”38″ size_phone=”36″ margin_top=”50″ margin_bottom=”50″ font_family=”none”]
TM Add-on 加值软件
[/mk_fancy_title][vc_row_inner is_fullwidth_content=”false”][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767295846{margin-bottom: 0px !important;}”]![]()
TMflow 离线编辑器
(TMflow Editor)
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767335088{margin-bottom: 0px !important;}”]
![]()
TMvision
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654769169477{margin-bottom: 0px !important;}”]![]()
流水线追踪
(Conveyor Tracking)
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767408594{margin-bottom: 0px !important;}”]
![]()
达明 ROS 驱动工具
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767504090{margin-bottom: 0px !important;}”]![]()
TMstudio
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767541822{margin-bottom: 0px !important;}”]![]()
机器人管理编程接口
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/mk_page_section][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1597376979625{padding-top: 100px !important;padding-bottom: 0px !important;}” id=”TMvision”][vc_column][vc_row_inner is_fullwidth_content=”false” css=”.vc_custom_1594288223341{padding-top: 100px !important;}”][vc_column_inner][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMvision 加值软件
[/mk_fancy_title][vc_column_text css=”.vc_custom_1594286515699{margin-bottom: 0px !important;}”]
购买 TMvision 软体授权来获取更多强大、
实用的视觉模组功能,帮助您实现更多视觉应用
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″][mk_fancy_title margin_top=”20″ margin_bottom=”0″ font_family=”none”]
外接视觉模组 (2D)
购买外接视觉软体授权,您便可以于TM Robot控制线连接并开启外接相机,实现Eye-to-Hand(眼到手)、Upward-looking(眼观手),等进阶视觉应用。
支援相机型号: 型号连结[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2020/07/eye-to-handeth.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594264034325{margin-bottom: 0px !important;}”]Eye-TO-Hand(ETH) 眼到手
– 相机做取像或辨识时,手臂可同时移动进行工作,可享有较佳的工作周期(Cycle Time)
– 适合输送带追踪、栈板下料等应用,也可做条码读取器、品质检测器等运用[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2020/07/up-ward-looking.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1595388355946{margin-bottom: 0px !important;}”]Up-Ward Looking 眼观手 (又称二次定位)
– 由手臂夹取物体后移动到相机视野内,做二次定位。此种应用模式能享有较佳的定位精度
– 适合应用在高精度组装作业如手机、面板等产品的组装。也可用做物体侧边、底部的条码识别[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1601978923434{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false” css=”.vc_custom_1594288234264{padding-top: 100px !important;}”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
TM 3DVision 模组
购买TM 3DVision进阶视觉功能软体授权,帮助您扩大视觉定位的适用物体类型广度,精确定位具姿态多样性的物体。需搭配 官方指定的外接3D相机 型号连结1、型号连结2。欲侦测定位的物体可透过手臂抓取并由外接3D相机进行多角度取像来生成点云图,也可事先汇入物体的CAD档。此功能支援下列定位方式:[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1594272875802{padding-bottom: 100px !important;}”][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/geometry.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1595388393193{margin-bottom: 0px !important;}”]
几何图形定位
比对几何图形并定位出
符合该几何图形的物体[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/pre-defined-cad.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1594286577965{margin-bottom: 0px !important;}”]
CAD模型定位
比对预定义模型并定位出
符合该模型的物体[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/point-pose.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1594286565274{margin-bottom: 0px !important;}”]
点云姿态定位
针对不规则形物体
利用点云特征定位物体[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][mk_page_section bg_color=”#1c2227″ min_height=”200″ padding_top=”100″ padding_bottom=”100″ sidebar=”wptimeline-sidebar”][vc_column width=”1/2″][vc_column_text css=”.vc_custom_1598327920866{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column][vc_column width=”1/2″][vc_column_text el_class=”AI-video” css=”.vc_custom_1600671677845{margin-bottom: 0px !important;padding-right: 1rem !important;padding-left: 1rem !important;}”]
搭配AI分群功能 提高视觉定位效率
可搭配AI分群功能,将3D相机视野内的点云分割成多个小群体。进行视觉定位的演算法时可在每个小群体内搜寻欲定位的物体,减少演算法计算量并提高效率
[/vc_column_text][vc_column_text css=”.vc_custom_1606470010677{margin-bottom: 0px !important;padding-right: 1rem !important;padding-left: 1rem !important;}”]
Collision Check 碰撞检测模组
避免手臂与周遭物件碰撞
3D视觉常用于3D箱体取物的运用,此模组包含自体干涉与环境干涉检测功能,可防止手臂在箱体取物过程中发生不必要的碰撞[/vc_column_text][/vc_column][/mk_page_section][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1606441361936{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
AI 模组
购买AI模组功能,让您的机器手臂可使用预先导入的AI模型深度学习结果做为视觉任务判断基准,进行AI物件分类、AI物件侦测等功能
*一组AI模组软体授权可使用在一只机器手臂上
**此功能模组需搭配AI模型训练软体 达明 AI+训练服务器使用,AI模组功能执行的判断基准须来自训练软体的深度学习训练结果,欲了解更多请参考 TM AI+ 介绍。
[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ai-classification.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594286675137{margin-bottom: 0px !important;}”]
AI物件分类
使手臂可以辨别特定影像中的
物体属于何种类别[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ai-detection.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594348888298{margin-bottom: 0px !important;}”]
AI物件侦测
使手臂可以侦测并定位出特定影像中所有不同类别的物件[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1601978959350{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
其他进阶视觉模组
分别购买下列模组以获得进阶视觉功能:[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ocr-module.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1595388563972{margin-bottom: 0px !important;}”]
光学字元识别模组
- 包含光学字元识别、数字OCR辨识功能
- 支援辨识9种常见字体包括Arial、Verdana、
Times New Roman等以及这些字体的粗体型式 - 数字部分可辨识负数及小数点数字
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/identify-measure-module.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594286800985{margin-bottom: 0px !important;}”]
辨识及量测模组
- 包含姿态偏移侦测、色彩面积、减去模版影像、毛边检测、
物件计数、距离与角度量测等
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row css=”.vc_custom_1601978833200{padding-top: 200px !important;}” id=”TMflowEditor”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
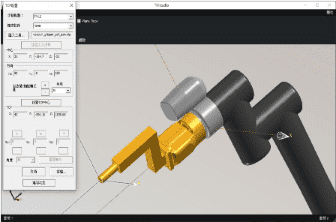
TMflow Editor
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1610695886445{padding-bottom: 200px !important;}”][vc_column width=”1/2″][mk_fancy_title size=”36″ force_font_size=”true” size_smallscreen=”36″ size_tablet=”34″ size_phone=”30″ margin_bottom=”” font_family=”none” animation=”fade-in”][/mk_fancy_title][vc_column_text css=”.vc_custom_1595388716901{margin-bottom: 0px !important;}”]
离线编辑
TMflow离线编辑器提供您在离线况状下开启/编辑Flow的方便性,您可以事先编辑好所有的 Flow Node、逻辑、变数、运动类型以及整体布局,在使用专案汇入手臂中时,将您事先安排设计妥当的Node名称,复写实际点位至Flow中,就是这么简单!
无需学习新的软体
无需额外的教育训练与学习,TMflow离线编辑器介面与机器人使用软体相同,您可在您的个人电脑内,透过简单操作,即可轻松修改专案,调整流程。
保持机器人生产力效益
无需额外控制器,搭配型号之外购外接相机、编码器与EtherCAT扩充模组即可使用。[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/2″][mk_image src=”https://tm-robot.com/wp-content/uploads/2018/07/addon_section2_img1.jpg” image_size=”medium” align=”center” margin_bottom=”20″ animation=”fade-in”][mk_image src=”https://tm-robot.com/wp-content/uploads/2018/07/addon_section2_img2.jpg” image_size=”full” animation=”bottom-to-top”][/vc_column][/vc_row][vc_row id=”TMstudio”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMstudio
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1610701472977{padding-bottom: 200px !important;}” id=”TMstudio”][vc_column width=”1/3″ css=”.vc_custom_1610695482724{background-color: #ffffff !important;}”][vc_column_text css=”.vc_custom_1616483973398{margin-bottom: 0px !important;}”]
工作站模组
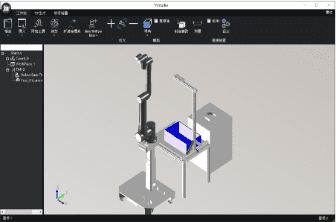
让使用者汇入机器人、工件、工具以及应用相关设备,于实际建置工作站与编辑机器人专案前事先模拟其环境。[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/3″][vc_column_text css=”.vc_custom_1616484011493{margin-bottom: 0px !important;}”]
TCP生成模组
协助使用者于所绘制的末端工具CAD图档设定TCP资讯。
TM 3DVision应用
工作站建立的场景与TCP生成建立的TCP可汇出至TMflow,用于TM 3DVision的随机料箱取物应用中,可搭配碰撞检测node功能,避免手臂取物过程发生碰撞。[/vc_column_text][/vc_column][vc_column width=”1/3″][vc_column_text css=”.vc_custom_1616484054995{margin-bottom: 0px !important;}”]
堆栈精灵模组
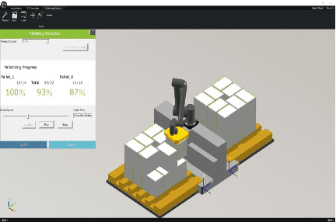
可模拟及汇出TM Palletizing Operator之layout档案。
TM Palletizing Operator应用
TMstudio堆栈精灵(TMstudio Palletizing Wizard)是应用导向的专属软体,提供更佳的堆栈模拟及碰撞侦测,可客制化箱体、栈板尺寸、箱体位置与顺序。[/vc_column_text][/vc_column][/vc_row][vc_row id=”TMRos”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
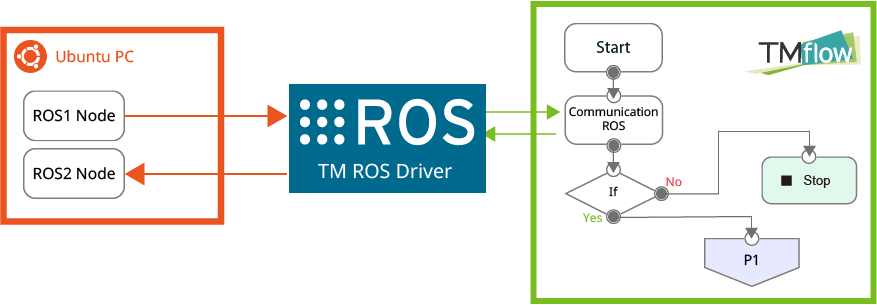
TM ROS Driver
[/mk_fancy_title][vc_column_text css=”.vc_custom_1594274522422{margin-bottom: 0px !important;}”]
您是否已拥有一套自己开发的控制程式? 并希望使用同一套程式就能控制TM Robot?
您可下载达明ROS驱动工具帮助您达成此需求!
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1597377250962{padding-bottom: 200px !important;}” id=”TMROSdriver”][vc_column][vc_column_text css=”.vc_custom_1616912276106{margin-bottom: 0px !important;}”]
达明ROS驱动工具为了程式开发者而打造,可将TM Robot的操作软体TMflow跟开发者自行开发的外部控制程式做连结,并可依使用者需求将机器人的控制权,
在TMflow和外部控制程式间做传递,达成让开发者用自己开发的程式也能控制TM Robot的目标。
 [/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1594348816882{margin-bottom: 0px !important;}”]下载 达明ROS驱动工具(Github)[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348831463{margin-bottom: 0px !important;}”]下载 达明ROS驱动工具(Docker Hub)[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348841485{margin-bottom: 0px !important;}”]
[/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1594348816882{margin-bottom: 0px !important;}”]下载 达明ROS驱动工具(Github)[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348831463{margin-bottom: 0px !important;}”]下载 达明ROS驱动工具(Docker Hub)[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348841485{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1610695838891{padding-top: 100px !important;background-color: #fafafa !important;}” id=”ConveyorTracking”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
Conveyor Tracking
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1610695928092{margin-bottom: 200px !important;padding-bottom: 50px !important;background-color: #fafafa !important;}”][vc_column width=”1/2″][vc_column_text css=”.vc_custom_1594286871201{margin-bottom: 0px !important;}”]
物料处理问题的更优解决方案
流水线追踪可以基于视觉或感测器取得物体位置和方向的信息,以实现高精度的动态输送带追踪。
完善的软硬体整合
无须额外控制器,搭配型号之外购外接相机、编码器与EtherCAT扩充模组即可使用。[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/2″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2018/07/addon_section1_img.png” image_size=”full” animation=”fade-in”][/vc_column][/vc_row][vc_row id=”api”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
机器人管理编程接口
(TM Robot Management API)
[/mk_fancy_title][vc_column_text css=”.vc_custom_1610698110430{margin-bottom: 0px !important;}”]
融入TM Robot到您的工厂管理系统 实现智慧设备管理
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][vc_column_text css=”.vc_custom_1625207755566{margin-bottom: 0px !important;}”]
现今许多工厂都导入物联网设备管理系统,收集厂内的各项设备数据并做分析、监控。
达明机器人推出机器人管理编程接口,帮助开发人员将TM Robot整合进既有
管理系统,搜集手臂资讯做管理或开发更多应用。
[/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484496043{margin-bottom: 0px !important;}”]
轻量化方便部署
支援多平台如Linux,Ubuntu等
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484573285{margin-bottom: 0px !important;}”]
 多台手臂联机
多台手臂联机
方便物联网管理
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484610773{margin-bottom: 0px !important;}”]
 多种通讯接口
多种通讯接口
方便整合且不限开发语言
[/vc_column_text][/vc_column_inner][/vc_row_inner][vc_column_text css=”.vc_custom_1611039300804{margin-bottom: 0px !important;}”]
机器人管理编程接口可支援多种数据传输接口
提高使用者在实行物联网设备管理上的资讯整合方便性与效率
[/vc_column_text][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/01/addon_api_img1.png” image_size=”full” align=”center”][vc_column_text css=”.vc_custom_1611814281088{margin-bottom: 0px !important;}”]
从多只手臂取得数据后汇出至使用者现行管理系统并做更多应用
[/vc_column_text][/vc_column][/vc_row]