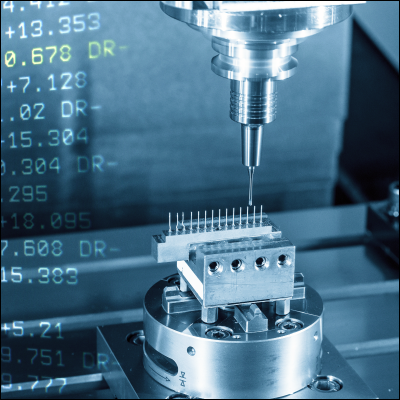

探索三大开发领域,打造灵活且强大的自动化应用



机器人程序设计
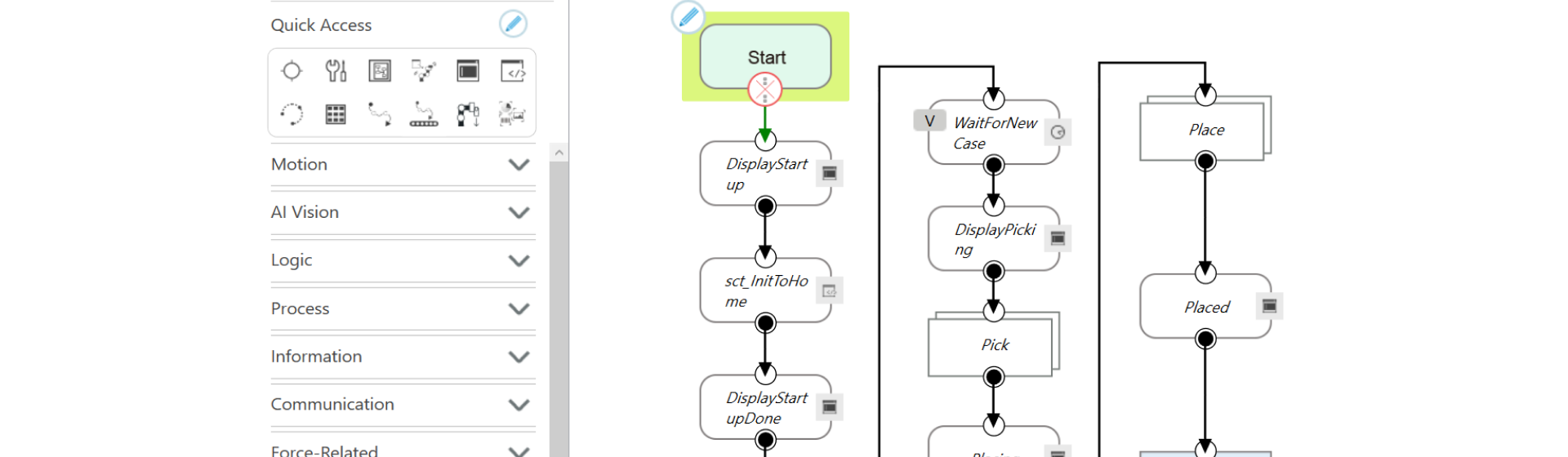
人人都能上手的可视化编程
使用我们直观的 TMflow 软件时,您可以选择「流程项目 (Flow Project)」以可视化方式建立应用程序。此方法采用区块图与「拖、放、开发」的模式,非常适合机器人领域的初学者。
如需更多细节,请参阅 TMflow 软件手册。
远程控制与系统集成
Listen Server:远程动作控制
Listen Server 支持透过 TMscript 远程控制机器人动作。您可在流程项目中透过 Listen 节点启用,或在脚本项目中执行 ScriptListen() 函式来启动。详细指引请参阅 TMscript 程序语言手册。
数据撷取与系统配置
TMflow 整合了多种服务器协议,如 Modbus、Ethernet,以及可选配的 Profinet 与 Ethernet-IP,实现无缝的数据撷取与系统配置。这确保了在各种工业环境中的灵活与稳健整合。主要功能包括: • 检查机器人状态与位置(TCP、关节数据、IOs、安全 IOs) • 管理项目速度与运行时间 • 存取并配置系统数据
TM ROS 资源库:无缝 ROS 整合
针对 ROS 开发者,我们的 TM ROS 资源库提供将 TM AI 协作机器人整合至 ROS 项目所需的一切。您可存取以下工具: • TM ROS Driver (驱动程序) • 各类机器人型号的 3D 模型 • Gazebo 与 Moveit 的启动档案 TM ROS Driver 让开发者能透过 ROS 控制机器人动作并存取数据,从而在 ROS 生态系中实现高效的仿真、规划与任务执行。
EIH 相机 API:客制化视觉解决方案
利用我们的 EIH 相机 API,将您的定制化视觉算法与 TM AI 协作机器人的手眼相机整合。您可存取原始影像数据、检索并修改配置,并根据特定需求控制相机。
自定义插件与功能扩充
透过提供合适的工具与平台,第三方开发者可以将崭新的观点与创意转化为突破性的解决方案。这些贡献不仅增强了 TMflow 的功能,更显著丰富了整体使用者体验。客制化插件在以下关键场景中特别具有价值:
装置操作
协助工程师无缝整合并控制机器人上的第三方装置,如夹爪、致动器及其他接口设备。
应用程序设定精灵
透过直观的逐步引导配置,简化焊接或堆栈等复杂应用程序的建置流程。
定制化仪表板
建立量身打造的显示接口,针对您的应用提供洞察与监控,提升运作效率与管理能力。
TM Components:简易客制化
使用 TM Components 在流程项目中建立客制化节点。透过 TM Component Editor,将节点、变量与配置打包成高效且易于测试的组件。
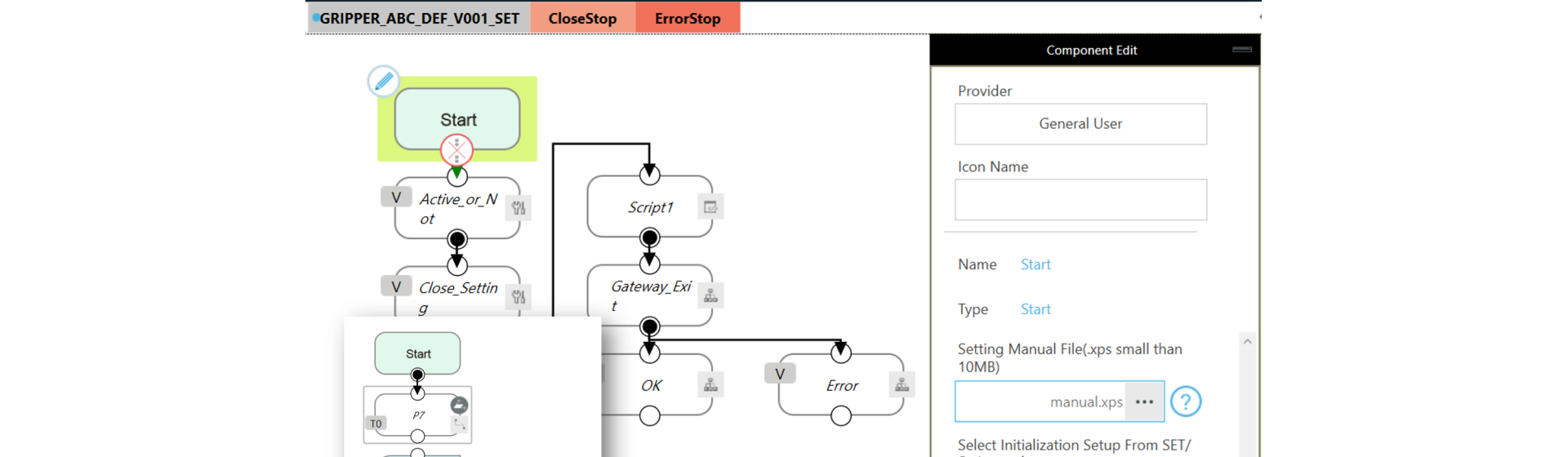
了解如何在 TMflow 中建立 TM 组件 TM 组件编辑器手册 .
TMcraft 插件:进阶客制化
TMcraft 允许开发者建构直接嵌入 TMflow 的精密插件。利用 C# 与 WPF 打造高度客制化的接口,并善用社群资源以丰富开发体验。
开始使用 TMcraft API 文档 开启您的仿真之旅 .
TMflow 仿真器:部署前测试
TMflow Simulator 是一套强大的工具,让您能在虚拟环境中进行项目的原型设计、测试与优化。这能降低成本、减少风险,并确保您的解决方案在真实环境中能发挥最佳效能。
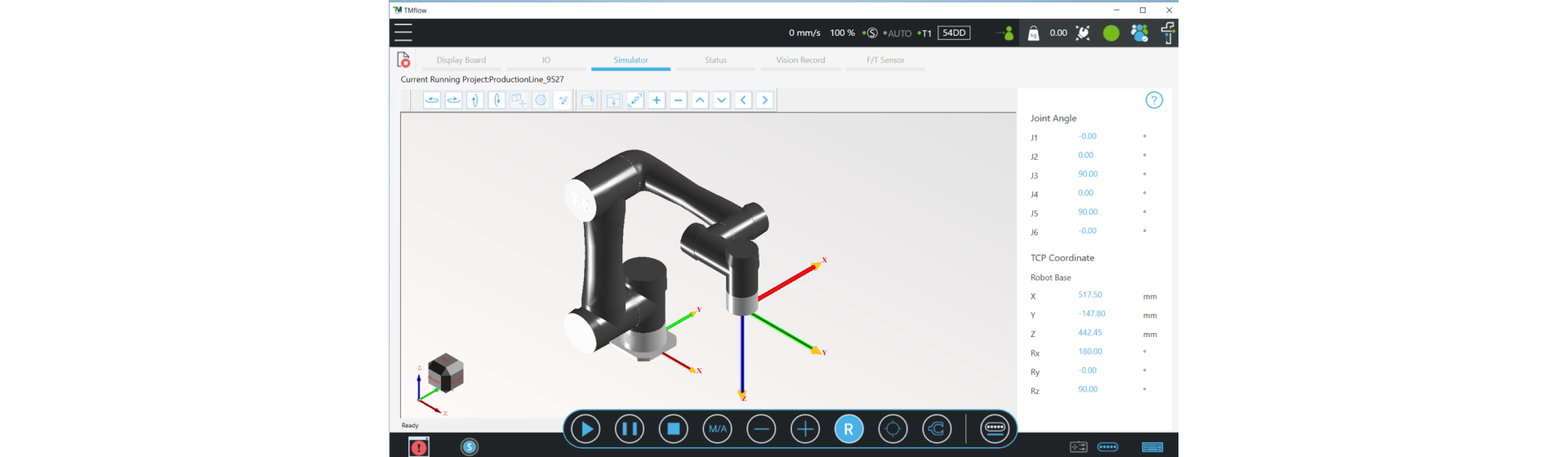
使用 TMflow 仿真器指南 开启您的仿真之旅 .