
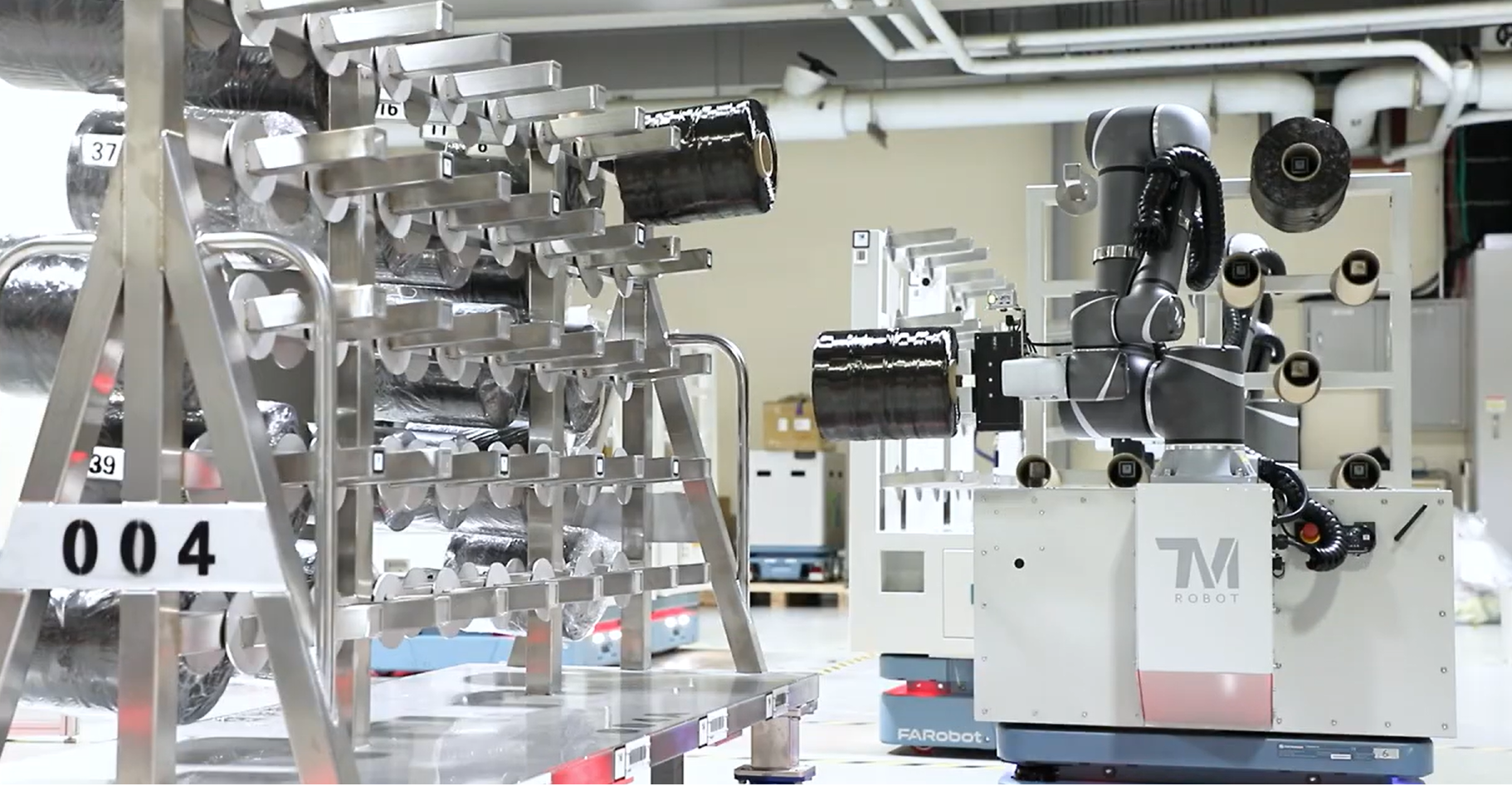
AMR 复制解决方案
AMR(自主移动机器人)在多机协同执行相同任务时,常面临效率与一致性的挑战。通过AMR项目复制解决方案,您可快速、无缝地将已验证的机器人项目部署至其他机器人,无需繁琐的手动调整,确保所有机器人作业路径与性能高度一致,从而显著提升整体生产效率。
从手动调整到快速部署
在生产线自动化中,部署多台机器人既耗时又费工。为确保所有机器人的移动点位完全一致,必须逐一调整每台机器人。
过去
在生产线自动化中,部署多台机器人既耗时又费工。为确保所有机器人的移动点位完全一致,必须逐一调整每台机器人。
现在
项目复制后,机器人仅需执行设定的自动校准流程,即可实现完全一致的运动轨迹,将多台机器人之间的点位误差控制在极低范围。
机器人复制的问题与解决方案
锁定机器人底座的人为误差
机器人安装于底座时存在组装误差,导致不同机器人的坐标参考点不一致。 解决方案: 导入视觉坐标定位,利用视觉补偿机器人坐标参考点的差异。
末端工具制造与安装误差
工具制造过程存在公差,安装于法兰面时亦有组装误差。 解决方案: 导入自动视觉 TCP 校正功能,以获取工具末端点的精确位置。
在数分钟内完成新机器人程序的快速复制与部署
点位
原始机器人在视觉坐标系中写入点位。
快速扩展您的协作机器人阵容
透过 AMR 复制方案简化部署流程,仅需搭配 TM TCP 校正套件,即可精准且迅速地复制工站。

自动化应用变得更加便捷高效
我们的协作机器人适用于多种任务场景,能够适配不同规模的生产环境。其设计注重易用性,便于安装、编程与操作,并具备良好的扩展性。作为由行业经验支持的解决方案,我们将在您的自动化进程中持续提供协助。